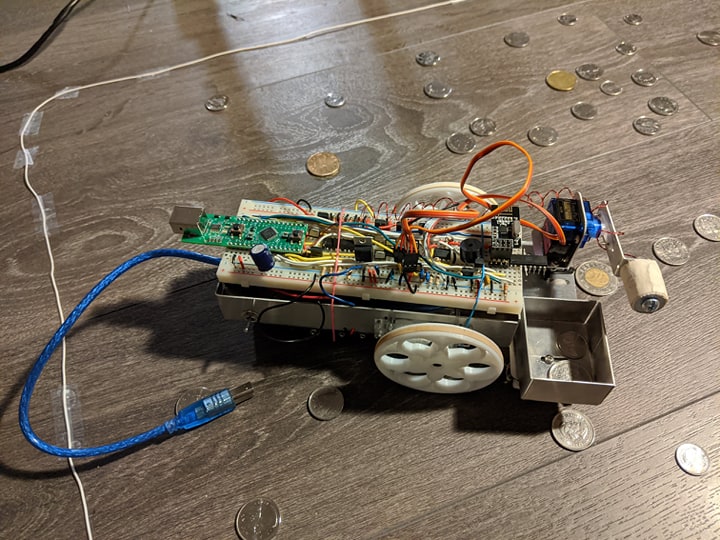
Our team developed this robot for a competition to see whose robot could collect the scattered coins fastest.
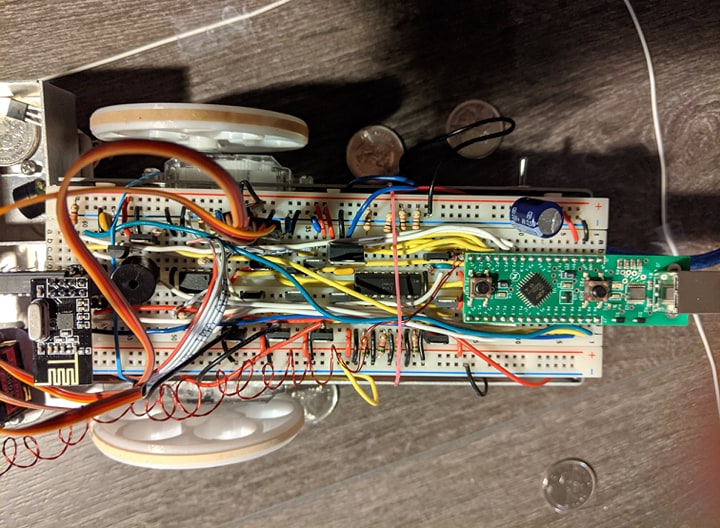
This robot uses metal/current detecting sensors, as well as servo controlled movement of the chassis and the arm mechanism.
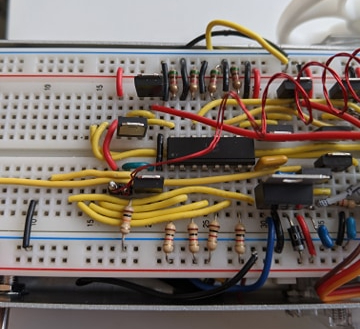
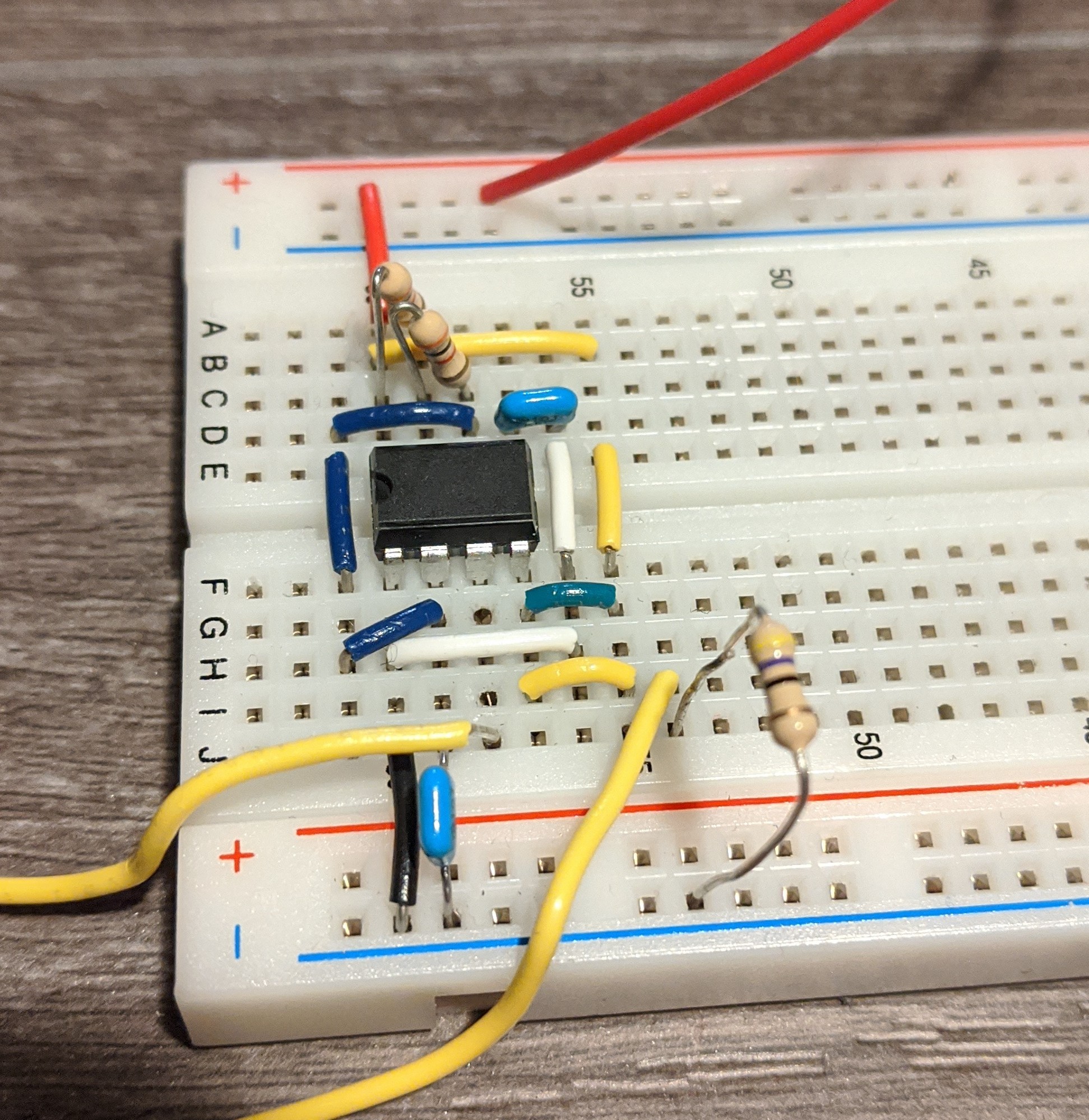
MOSFETs were used to control the current supplied to the magnet through input from the micro-controller as can be seen below.
A wire carrying a small current was used to serve as a boundary for the robot. On-board sensors detected the electromagnetic field generated by this wire as the robot neared the boundary.
View our GitHub page.
