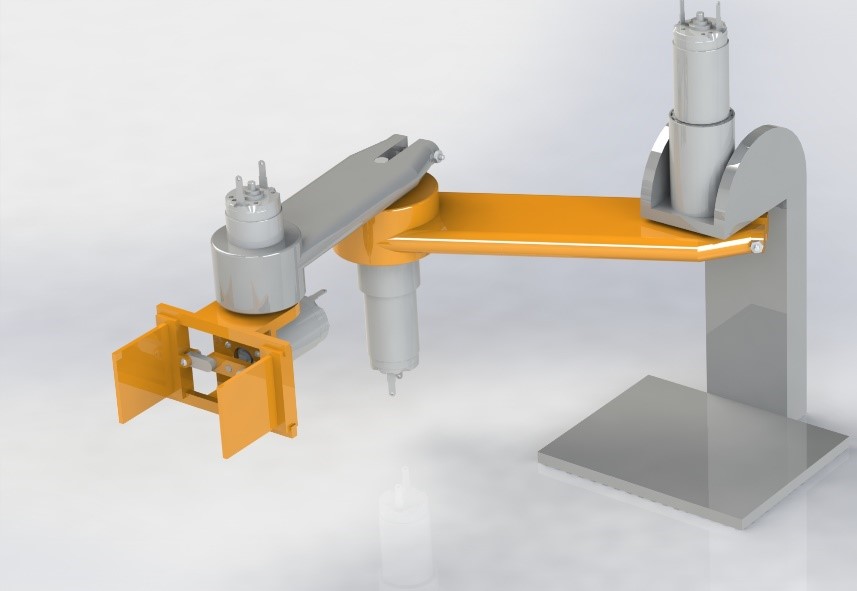
This robot arm was designed to facilitate the quality control of a marshmallow factory. Using 4 motors, the robot can quickly move 3cm wide marshmallows. To demonstrate the robot in operation, we made a video using SolidWorks.
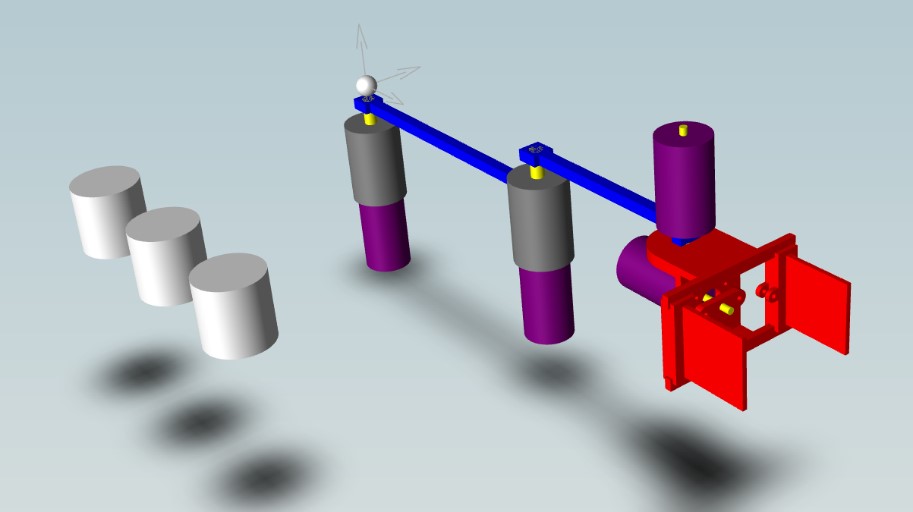
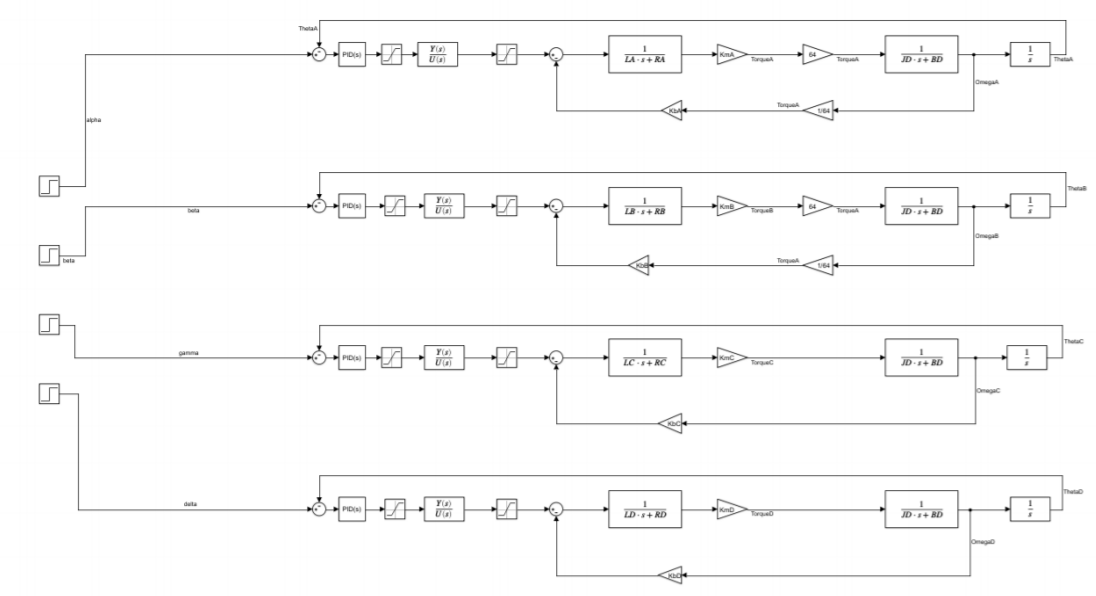
To simulate the robot in action, a primitive model was developed in SimulationX (left image), in tandem with a control model that was developed in Simulink (right image).
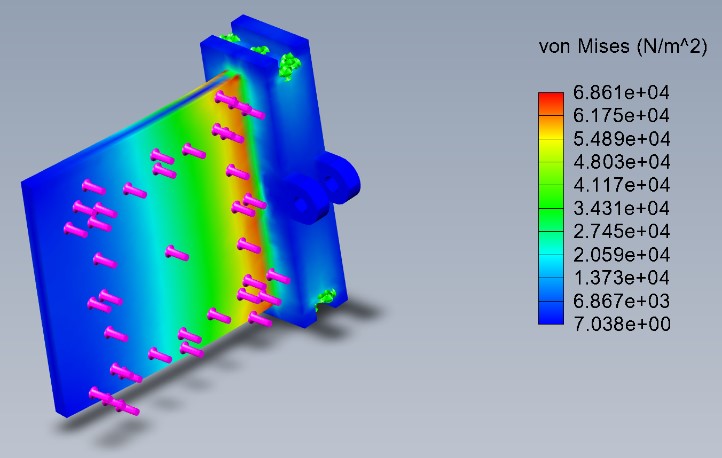

Using SolidWorks Simulations, the parts were placed under nominal simulated stress to see whether or not they would break. The material used for testing was PLA plastic that would allow for FDM 3D printing.
View out GitHub page.
